|
|||||||
|
Введение в библиотеку CMSIS
Время создания: 24.04.2022 01:45
Автор: Alexander Tarasov
Текстовые метки: stm32, библиотека, CMSIS
Раздел: Компьютер - Аппаратное обеспечение - Микроконтроллеры ARM
Запись: xintrea/mytetra_syncro/master/base/1650753948ihia1ezxgo/text.html на raw.githubusercontent.com
|
|||||||
|
|
|||||||
|
Библиотека CMSIS включает в себя следующие компоненты:
Далее рассматривается только CMSIS-CORE.
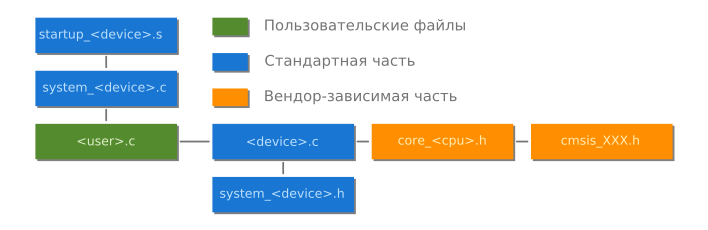
Библиотека состоит из стандартной (предоставляется ARM) и вендор-зависимой (предоставляется в нашем случае ST) частей. Заголовочный файл core_<processor_unit>.h предоставляет интерфейс к ядру. Для stm32f103c8 это core_cm3.h, так как он работает на Cortex-M3. Для Cortex-M0+ это будет файл core_cm0plus.h. Под интерфейсом понимается удобный доступ к его регистрам. Например, в состав ядра входят еще две сущности: системный таймер и контроллер прерываний NVIC. Поэтому в этом файле содержатся вспомогательные функции для их быстрой настройки. Включить прерывание можно вызовом функции: static __INLINE void NVIC_EnableIRQ(IRQn_Type IRQn) { NVIC->ISER[((uint32_t)(IRQn) >> 5)] = (1 << ((uint32_t)(IRQn) & 0x1F)); /* enable interrupt */ } Вам не нужно работать с регистрами ядра напрямую. Другие файлы нам не столь интересны, но справедливости ради упомянем их. Например файл core_cmInstr.h содержит обертки инструкций, а core_cmFunc.h — обертки некоторых важных системных функций. // Возвращает значение стека (PSP) __attribute__( ( always_inline ) ) static __INLINE uint32_t __get_PSP(void) { register uint32_t result; __ASM volatile ("MRS %0, psp\n" : "=r" (result) ); return(result); } Если вы не разрабатываете приложение на самом низком уровне, то заглядывать в эти файлы незачем. Тем не менее, подробное описание работы ядра можно найти в документе ARM — Cortex-M3 Devices Generic User Guide, и мы им даже воспользуемся при настройке системного таймера. Вторая часть библиотеки пишется непосредственным производителем микроконтроллера. Это происходит потому, что микроконтроллер — это не только его ядро, а еще и периферия. Реализация периферии не стандартизована, и каждый производитель делает ее так, как считает нужным. Адреса и даже поведение внутренних модулей (ADC, SPI, USART и т.д.) могут отличаться. В ассемблеровском файле startup_<device>.s (в нашем случае это startup_stm32f10x_md.s) реализуется функция обработчика сброса Reset_Handler. Он задает поведение МК при запуске, т.е. выполняет некоторые задачи до входа в функцию main(), в частности, вызывает функцию SystemInit() из файла system_<device>.c (system_stm32f10x.c). Также в нем задается таблица векторов прерываний (англ. interrupt vector table) с их названиями: g_pfnVectors: .word _estack .word Reset_Handler .word NMI_Handler .word HardFault_Handler .word MemManage_Handler .word BusFault_Handler .word UsageFault_Handler # ............................ .word SVC_Handler .word DebugMon_Handler .word 0 .word PendSV_Handler .word SysTick_Handler .word WWDG_IRQHandler # ............................ Заголовочный файл system_<device>.h (system_stm32f10x.h) предоставляет интерфейс двум функциям и глобальной переменной и отвечает за систему тактирования.
Обратите вниманиеМеняя это число, вы не меняете тактовую частоту! Переменную SystemCoreClock стоит использовать только как индикатор. Более того, никто не гарантирует, что число, записанное в этой переменной, будет отображать реальную частоту: во-первых, оно может не обновиться после изменения регистров; во-вторых, оно никак не учитывает погрешность хода генератора; и в-третьих, стандартная частота (определенная как макрос HSE_VALUE в библиотеке) внешнего кварцевого генератора — 8 МГц, но никто не мешает разработчику поставить, скажем, кварц на 12 МГц.
И последний файл, самый важный для программиста, это драйвер микроконтроллера <device>.h (stm32f10x.h). Вся карта памяти микроконтроллера (о ней еще поговорим) записана там в виде макросов. Например, адрес начала регистров периферии, флеш и оперативной памяти: #define FLASH_BASE ((uint32_t)0x08000000) #define SRAM_BASE ((uint32_t)0x20000000) #define PERIPH_BASE ((uint32_t)0x40000000) Регистры модулей, таких как порты ввода-вывода, обернуты в структуры. typedef struct { __IO uint32_t CRL; __IO uint32_t CRH; __IO uint32_t IDR; __IO uint32_t ODR; __IO uint32_t BSRR; __IO uint32_t BRR; __IO uint32_t LCKR; } GPIO_TypeDef; Вместо того, чтобы обращаться к ячейке по нужному адресу, это можно сделать через структуру. #define APB2PERIPH_BASE (PERIPH_BASE + 0x10000) // ... #define GPIOA_BASE (APB2PERIPH_BASE + 0x0800) // ... #define GPIOA ((GPIO_TypeDef *) GPIOA_BASE) Так как элементы в структуре расположены линейно, друг за другом, а длина регистра фиксирована (uint32_t, 4 байта), то регистр CRL хранится по адресу GPIOA_BASE, а следующий за ним CRH через четыре байта, по адресу GPIOA_BASE + 4. Ниже приведен пример настройки одной из ножек порта на выход. Вам этот код пока что ничего не скажет, но суть сейчас в другом — вам нужно увидеть пример использования библиотеки. RCC->APB2ENR |= RCC_APB2ENR_IOPAEN; // Включение тактирования порта A GPIOA->CRL &= ~GPIO_CRL_MODE3_0; // set as GPIOA->CRL |= GPIO_CRL_MODE3_1; // output with 2 MHz speed GPIOA->CRL &= ~GPIO_CRL_CNF3; // push-pull output В самом конце файла есть полезные макросы для записи, сброса, чтения битов и целых регистров. #define SET_BIT(REG, BIT) ((REG) |= (BIT)) #define CLEAR_BIT(REG, BIT) ((REG) &= ~(BIT)) #define READ_BIT(REG, BIT) ((REG) & (BIT)) #define CLEAR_REG(REG) ((REG) = (0x0)) #define WRITE_REG(REG, VAL) ((REG) = (VAL)) #define READ_REG(REG) ((REG)) #define MODIFY_REG(REG, CLEARMASK, SETMASK) WRITE_REG((REG), (((READ_REG(REG)) & (~(CLEARMASK))) | (SETMASK))) Мы рассмотрели, как эти операции работают, в разделе «Микроконтроллер под микроскопом». Т.е. код выше можно переписать так (и он будет более читаем): SET_BIT(RCC->APB2ENR, RCC_APB2ENR_IOPAEN); CLEAR_BIT(GPIOA->CRL, GPIO_CRL_MODE3_1); // ... Для всех стандартных типов (определенных в <stdint.h>) вводятся сокращенные синонимы, например: typedef uint32_t u32; typedef uint16_t u16; typedef uint8_t u8; typedef const uint32_t uc32; typedef const uint16_t uc16; typedef const uint8_t uc8; typedef __IO uint32_t vu32; typedef __IO uint16_t vu16; typedef __IO uint8_t vu8; Слово __IO не входит в стандарт языка, а переопределено в core_cm3.h: #define __IO volatile Последнее, о чём нужно упомянуть, это перечисление IRQn_Type. typedef enum IRQn { // Cortex-M3 Processor Exceptions Numbers NonMaskableInt_IRQn = -14, MemoryManagement_IRQn = -12, BusFault_IRQn = -11, UsageFault_IRQn = -10, SVCall_IRQn = -5, DebugMonitor_IRQn = -4, PendSV_IRQn = -2, SysTick_IRQn = -1, // .... #ifdef STM32F10X_MD ADC1_2_IRQn = 18, USB_HP_CAN1_TX_IRQn = 19, USB_LP_CAN1_RX0_IRQn = 20, CAN1_RX1_IRQn = 21, CAN1_SCE_IRQn = 22, EXTI9_5_IRQn = 23, TIM1_BRK_IRQn = 24, TIM1_UP_IRQn = 25, // ... #endif /* STM32F10X_MD */ } IRQn_Type; Оно устанавливает номер исключительной ситуации в соответствие с его названием. Когда вы вызываете функции NVIC_Enable() или NVIC_Disable(), в качестве параметра нужно использовать одно из имен в этом перечислении. |
|||||||
|
Так же в этом разделе:
|
|||||||

|
|||||||
|
|||||||
|