 Сегодня будет новость о рабочих буднях.
Сегодня будет новость о рабочих буднях.
Фирма, в которой я работаю программистом под мобильные платформы, занимается высокоточной спутниковой навигацией. Основное направление работы - приборы гражданской судовой навигации (GPS, ГЛОНАСС). Однако высокоточная навигация нужна не только на воде, но и на суше, и в космосе. Поэтому в компании развивают несколько линеек приборов (а точнее, программно-аппаратных комплексов). Проекты создаются по совершенно разным сценариям использования:
- Высокоточная судовая навигация
- Мониторинг подвижности грунтов
- Мониторинг пространственной деформации крупных объектов
- Системы высокоточной навигации подвижных объектов (сельское хозяйство, параллельное вождение)
Есть так же проекты по использованию оборудования на железнодорожном транспорте, в квадрокоптерах, и что совсем уж безумно круто - на универсальном разгонном блоке "Фрегат" для выведения космических аппаратов на целевые орбиты.
Но речь в этой новости пойдет об удачном завершении очередной вехи в разрабатываемой нами системе точного земледелия.
Высокие технологии в сельском хозяйстве в России, вопреки всепропальщикам и вопреки действиям финансовых властей, все-таки развиваются. Мировой тренд сейчас - это точное земледелие, позволяющее минимизировать расход топлива, удобрений, посевного материала и уменьшить траты на обслуживание техники за счет оптимального использования сельхозоборудования. Основы точного земледелия - это спутниковое позиционирование, подруливающие устройства и системы автовождения плюс различного рода программное обеспечение.
Сейчас на рынке оборудования для точного земледелия правят бал иностранные гиганты, такие как Trimble, TeeJet, AgLeader, Hexagon Agriculture. Стоимость комплекта оборудования и ПО этих производителей для небольшого хозяйства - несколько миллионов рублей на лето 2018 года, плюс различного рода ежегодные лицензионные отчисления в районе тысячи долларов на каждый движущийся агрегат. Это очень серьезные вложения для предприятия, балансирующего на грани рентабельности, что обычно для любого производящего предприятия в России. Поэтому многие хозяйства отказываются от внедрения точного земледелия до более жирных времен.
В России есть несколько компаний, которые предлагают системы точного земледелия собственной разработки, различной степени готовности по более реалистичным ценам. Но на самом деле, в большинстве своем, это оборудование "не очень точного" земледелия, которое представляет из себя стандартный китайский GSP/GLONASS модуль с выносной антенной и программное обеспечение, запускаемое на планшете в защищенном исполнении. Точность позиционирования у таких устройств невысокая - до нескольких метров, и, по сути, они недалеко ушли от автомобильных навигаторов. Координаты одной и той же точки на поле в утренние и вечерние часы могут плясать на метры, в зависимости от спутниковой обстановки, что не позволяет обрабатывать, например грядки. Удел таких устройств - это выполнение работ, не требующих высокой точности: опрыскивание, внесение удобрений вразброс, почвообработка. Немного сглаживает проблему ручное смещение стартовых координат на нужную позицию при начале работы (т.н. подтяжка линии), но качественного повышения точности позиционирования этот прием не дает.
Для настоящего точного земледелия требуется точность, которую могут обеспечить только две вещи: платные поправочные (дифференциальные) сигналы специализированных спутников TerraStar, EGNOS, OmniStar, либо опора на базовые наземные RTK-станции (максимальная точность). Учитывая, что для вычисления дифференциальных спутниковых поправок на охватываемой территории необходима сеть базовых наземных станций, то пользоваться сигналами спутниковых сервисов TerraStar/EGNOS/OmniStar невозможно. Просто потому, что на территории России нет сети наземных станций этих поставщиков навигационных услуг, в результате чего они не могут вычислять дифференциальные поправки для нашей территории. Поэтому остается только использование базовой RTK-станции.
По моим наблюдениям, в России есть только одна компания, которая предлагает собственное готовое решение с RTK-станцией в области агронавигации. Но и здесь не все так просто: никому не нужна высокая точность в 1-2 см если нет подруливающего устройства или системы автовождения. А вот этого компонента данный российский лидер агронавигации не имеет.
* * *
И вот, на днях мы завершили полевые испытания собственной навигационной RTK-системы и системы автовождения на Ростсельмашевском полигоне. RTK-станция нами была уже разработана давно, и успешно используется в проектах по мониторингу подвижных грунтов и деформаций объектов. Обкатку проходили именно система гидравлического автовождения, а заодно и разрабатываемое мною мобильное навигационное приложение, которое в реальном времени отрисовывает движение объекта на карте в различных режимах, пишет трек и выводит необходимые навигационные параметры.
Я работаю удаленно, а наличием интернета в поле никого уже не удивишь. Комбаин двигался по полю, навигационные данные передавались на сервер в Санкт-Петербурге и отображались на мобильнике моего напарника, который находился рядом с механизатором. Я сидел в Волгодонске, подключившись к Питеру, и наблюдал за движением сельхозагрегата в реальном времени на десктопе, параллельно ведя страховочную запись навигационных данных. Это все было похоже на ожившую иллюстрацию к советским фантастическим рассказам о светлом технологическом будущем человечества.
Фреймверк Qt настолько крут, что позволяет разрабатывать мобильные приложения на десктопе, одновременно получая сборки как под мобильную ARM-платформу Android, так и для Linux/Windows десктопа. Я использую Debian Linux, поэтому с моей стороны движение комбайна выглядело так:
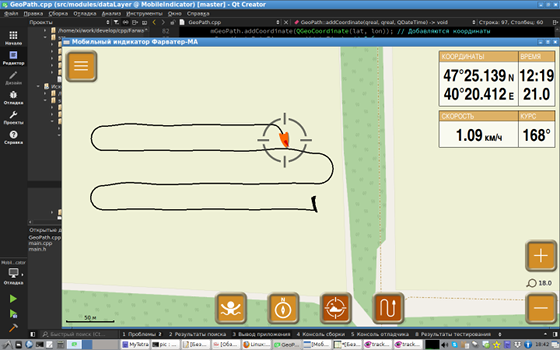
Да, здесь видна морская версия приложения, со значками слежения за судном и режимом "человек за бортом". Все-таки это не конечный продукт. Хотя, комбаин всегда назвали "кораблем полей", так что морская преемственность тут более чем уместна.
После проезда трек был выгружен в KML-формат, открыт на Google-картах, и разослан всем интересующимся:
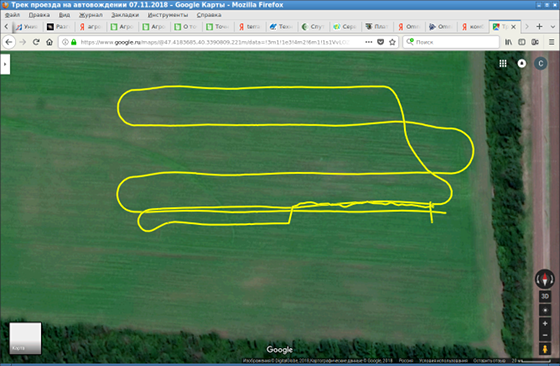
Ломанная линия в конце проезда - это наглядная демонстрация того, что происходит когда отключены поправки RTK-станции и не работает автовождение.
Для сравнения, вот еще два наших трека с тех же испытаний, переданные из моего приложения в GPX Viewer, который, как ни странно, отлично показывает KML-треки. На первом треке не очень опытный комбайнер пытается выдержать линию. На втором тот же комбаин двигается в режиме автовождения, обеспечиваемым нашим оборудованием.
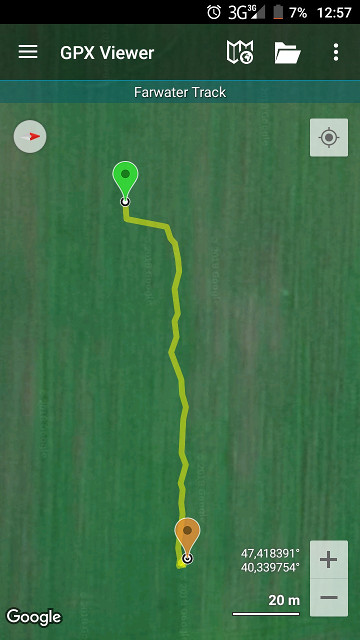

Эти треки и веселая песня в тему сложены на странице моего коллеги во Вконтакте: https://vk.com/jef239?w=wall723786_14175.


 Поиск по сайту
Поиск по сайту