В канун наступления нового, 2014 года, в моем городе Волгодонске одно из подразделений Станции Юных Техников провело соревнования по робо-сумо.
Соревнования состоялись в первый день зимних школьных каникул (26 декабря). Участвовать в соревнованиях приглашались все желающие. Как минимум, должны были участвовать два кружка - кружок детского творчества (условное название "Фотокружок", Новый город) и радиотехнический кружок (условное название "Радиокружок", Старый город). Но так как по регламенту соревнований допускалось участие только роботов LEGO, "Радиокружок" в соревнованиях участия не принял, так как в нём с конструкторами LEGO не работают, а занимаются более серьезными вещами на ATMega контроллерах.
Задача роботов в соревнованиях по робо-сумо следующая:
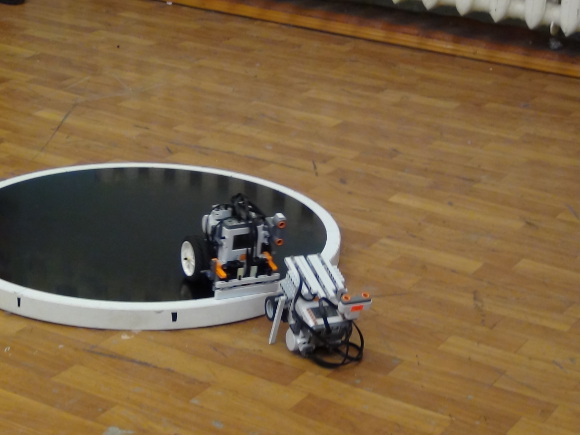
Два робота ставятся на круглый ринг диаметром ~1 м, роботы должны стремиться столкнуть противника с ринга. Роботы должны быть автономными и не должны управляться человеком. По краю ринга нанесена контрастная полоса, по которой роботы могут определять край ринга с помощью оптического датчика, обычно распложенного под днищем.
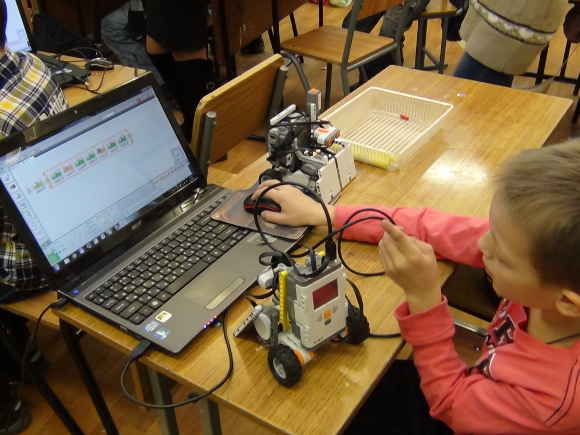
В соревнованиях участвовало 16 ребят, возраст был с первого по девятый класс. Согласно регламенту, чертежами никто не пользовался. Роботов собирали "на лету", по памяти. Так же, сразу на месте писали управляющие программы. На сборку, программирование и отладку отводился один час.
Ограничение на размер в плоскости пола было жестким, 15x15 см. Если робот превышал данные габариты, его нужно было переделать либо робот исключался из соревнований. Для определения размера использовалась специальная коробочка с миллиметровкой на дне:

Сборка роботов:



Самый младший участник соревнований, первоклассник Иван Басенко:

Отладка:
Роботы готовы к бою. Тут явно видно, что каждый делал кто во что горазд. Роботы были в основном на колесном приводе, но пара роботов была на гусеницах:

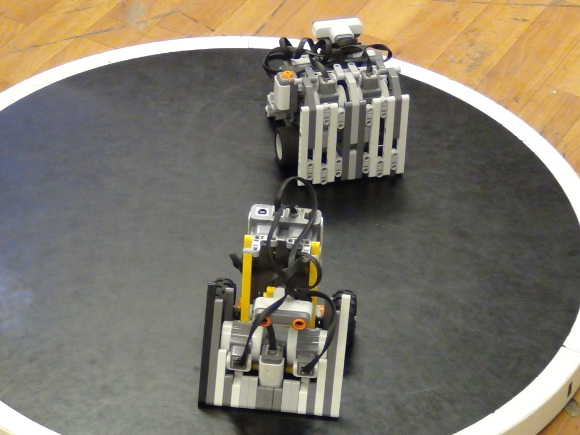
Бой продвинутого робота с механической системой обнаружения толкания сзади "умный зад" (сверху) и робота, собранного по классической схеме (снизу):
Роботов можно было разделить на два класса: классическая схема, и схема с "умным задом".
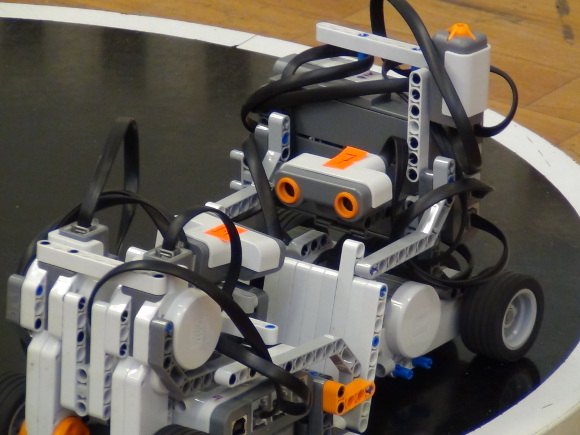
В классической схеме у роботов было всего два датчика: оптический датчик под днищем, используемый для обнаружения края ринга, и ульразвуковой сонар (датчик, похожий на два оранжевых глазика), используемый для обнаружения противника. Поведение примитивное: если впереди нет препятствия, робот крутится на месте. Как только робот обнаруживает препятствие (это противник), робот перестает крутиться и двигается вперед. При этом идет слежение за нижним датчиком, и если обнаруживается край ринга, робот двигается некоторое время назад.
В схеме с "умным задом", в задней части робота размещается датчик касания, прикрытый подвижной пластинкой. Если противник начинает выталкивать робота с поля сзади, робот это чуствует и начинает упираться. Именно эти роботы вышли в финал соревнований.
Противостояние роботов:
Эмоции часто зашкаливали. Кое-кто молился за своего робота прямо перед рингом:

Реакция зрителей-участников на финальный бой:

Подсчет результатов:

Победитель соревнований Антон Куликов со своим роботом:

Этот серьезный парень сделал робота с тремя световыми датчиками, в результате чего робот хорошо чувствовал край ринга, даже если подъезжал к краю под углом (многие роботы сваливались с ринга, так как при подъезде к краю слишком поздно срабатывал оптический датчик - уже в тот момент, когда боковые колеса съехали с ринга). Кроме того, робот-победитель был сделан добротно, и не рассыпался на ринге (а это реально происходило с некоторыми другими роботами). Заслуженное первое место, почет и уважение.
Распределение мест:
1-е место: Антон Куликов
2-е место: Владимир Козак
3-е место: Александр Заборовский
* * *
Об этих соревнованиях я узнал совершенно случайно. Поговорив с организаторами, выяснил, что такие соревнования происходят (внимание!) ежеквартально. Воистину, будущее уже здесь. То, что мы раньше видели в фантастических фильмах, сейчас уже бытовая повседневность, а роботов программируют дети.
Подробный фотоотчет с полноразмерными фотографиями можно посмотреть здесь:
https://www.dropbox.com/sh/0lna5jofvi48dy3/C6nJU2jBWw?m=


 Поиск по сайту
Поиск по сайту