|
|||||||
|
Контурный анализ - детектирование зашумленного бинарного объекта
Время создания: 21.11.2017 14:44
Автор: Александр Кручинин AKA vidikon
Текстовые метки: opencv, контур, нахождение объекта, детектирование, бинарный объект
Раздел: Компьютер - Программирование - Компьютерное зрение
Запись: xintrea/mytetra_syncro/master/base/1511264663eywjwns5xp/text.html на raw.githubusercontent.com
|
|||||||
|
|
|||||||
|
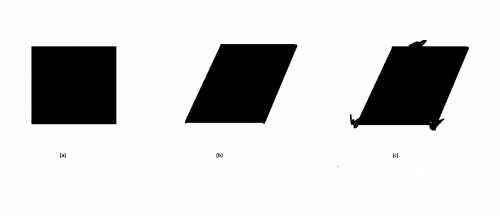
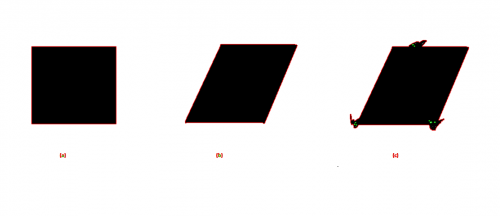
Бинарный объект Бинарный объект – это объект, созданный человеком, и находящийся в поле зрения камеры. К таким объектам относятся дорожные знаки, автомобильные номера, баркоды и т.п. Часто эти объект имеют контур, по которому они достаточно хорошо детектируются. Однако возникают ситуации, когда объекты серьезно наклонены к оси камеры в нескольких плоскостях, а при этом на них накладывается шум:
Здесь: (а) исходный объект, (б) искаженный объект в результате поворота к камере, (в) зашумленный объект Для правильного распознавания объекта необходимо провести перспективное преобразование. Но для этого необходимо получить 4 точки бинарного объекта. Цель данной публикации: определить 4 точки в зашумленном объекте изначальной прямоугольной формы. Доступные функции OpenCV для детектирования 4-х точек объекта Здесь и далее будет использоваться Си интерфейс функций. Если зайдем в документацию по структурному анализа, то увидим, что функций, подходящих для работы с полученным контуром для получения нужных нам точек не так уж много.
На простых примерах посмотрим, как это работает. Сначала заготовка с бинаризацией изображения: #include "opencv2/core/core_c.h" #include "opencv2/imgproc/imgproc_c.h" #include "opencv2/highgui/highgui_c.h" int main( int argc, char** argv ) { IplImage *image = cvLoadImage( "test.png" ); // 24-битное изображений IplImage *gray = cvCreateImage( cvGetSize( image ), 8, 1 ); // Пустое 8-битное изображение cvCvtColor( image, gray, CV_BGR2GRAY ); // Перевод в градации серого cvThreshold( gray, gray, 128, 255, CV_THRESH_BINARY_INV ); // Бинаризация cvSaveImage( "binary.png", gray );
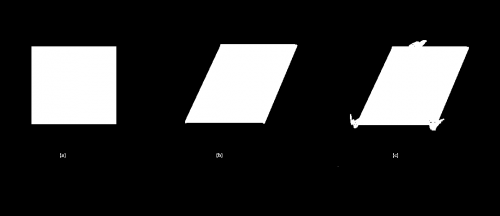
cvReleaseImage( &image ); cvReleaseImage( &gray ); return 0; } Результатом будет инвертированное изображение:
Далее сделаем нахождение контуров и минимального ограничивающего прямоугольника. boundingRect Для этого после бинаризации добавим следующий код: CvMemStorage* storage = cvCreateMemStorage(0); CvSeq* contours = 0; cvFindContours( gray, storage, &contours, sizeof(CvContour), CV_RETR_TREE, CV_CHAIN_APPROX_NONE, cvPoint(0,0) ); // Поиск контуров for( CvSeq* c=contours; c!=NULL; c=c->h_next) { CvRect Rect = cvBoundingRect( c ); // Поиск ограничивающего прямоугольника if ( Rect.width < 50 ) continue; // Маленькие контуры меньше 50 пикселей не нужны cvRectangle( image, cvPoint( Rect.x, Rect.y ), cvPoint( Rect.x + Rect.width, Rect.y + Rect.height ), CV_RGB(255,0,0), 2 ); }
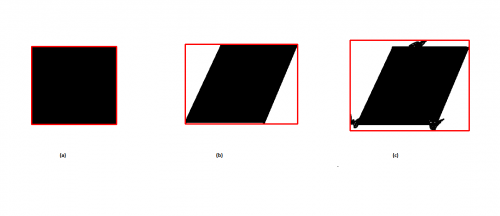
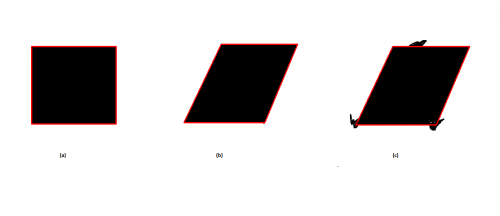
cvReleaseMemStorage( &storage); cvSaveImage( "image24.png", image ); Результатом программы будет:
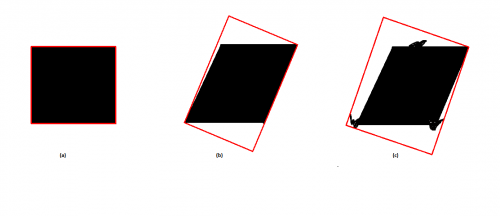
Видно, что детектировались нужные объекты. Но для (a) точки все правильные, для (b) правильные только 2 точки, а для (c) не найдено ни одной точки. minAreaRect Для получения ограничивающего Box модифицируем следующий пример, добавляя в цикл: CvBox2D b = cvMinAreaRect2( c ); DrawRotatedRect( image, b, CV_RGB(255,0,0), 2 ); При этом, определив ранее функцию вывода CvBox2D на экран: void DrawRotatedRect( IplImage * iplSrc,CvBox2D rect,CvScalar color, int thickness, int line_type = 8, int shift = 0 ) { CvPoint2D32f boxPoints[4]; cvBoxPoints(rect, boxPoints); cvLine(iplSrc,cvPoint((int)boxPoints[0].x, (int)boxPoints[0].y),cvPoint((int)boxPoints[1].x, (int)boxPoints[1].y),color,thickness,line_type,shift); cvLine(iplSrc,cvPoint((int)boxPoints[1].x, (int)boxPoints[1].y),cvPoint((int)boxPoints[2].x, (int)boxPoints[2].y),color,thickness,line_type,shift); cvLine(iplSrc,cvPoint((int)boxPoints[2].x, (int)boxPoints[2].y),cvPoint((int)boxPoints[3].x, (int)boxPoints[3].y),color,thickness,line_type,shift); cvLine(iplSrc,cvPoint((int)boxPoints[3].x, (int)boxPoints[3].y),cvPoint((int)boxPoints[0].x, (int)boxPoints[0].y),color,thickness,line_type,shift); } Результат:
Как видим, опят результат неудовлетворительный. approxPoly Вместо цикла в примере заменяем на код, а в findcontour – на CV_CHAIN_APPROX_SIMPLE: cvApproxPoly( contours, sizeof(CvContour), storage, CV_POLY_APPROX_DP, 3, 1 ); cvDrawContours( image, contours, CV_RGB(255,0,0), CV_RGB(0,255,0),2, 1, CV_AA, cvPoint(0,0) ); Результат:
Здесь представлены аппроксимированные контуры, которые не дают информации о 4-х точках. Попробуем аппроксимировать еще, но результата нужного нам нет. Алгоритм детектирования 4-х точек Поэтому приходим к тому, что нужен собственный алгоритм для детектирования этих 4-х точек. Он очень прост и сводится к принципу RANSAC. Т.е. берутся 2 точки из контура, по ним строится линия, и определяется сколько точек близки к данной линии. Таким образом определяются 4 линии, а на их пересечении будет находиться искомая точка. Естественно его нужно немного модифицировать, поскольку стороны – четыре. Но в целом функция, которая получает на вход контур может быть выполнена так: bool Find4Points( CvSeq* contour, CvPoint* Points, CvRect Rect ) { CvPoint* v_points = new CvPoint[contour->total]; int step = (Rect.width/4); int all_lines = 0; LINE_* lines = new LINE_[contour->total/step]; CvSeqReader reader; cvStartReadSeq( contour, &reader, -1 ); CvPoint p = { -1, -1 }; // Кандидаты на 4 линии for(int i = 0; i < contour->total; i++ ) { CV_READ_SEQ_ELEM( v_points[i], reader ); if ( i % step == 0 ) { if ( p.x != -1 ) { lines[all_lines] = MakeLine( cvPointTo32f( p ), cvPointTo32f( v_points[i] ) ); all_lines++; } p = v_points[i]; } } LINE_ lines4[4]; int all_lines4 = 0; for( int j = 0; j < all_lines; j++ ) { int k = 0; for( int it = 0; it < all_lines4; it++ ) { if ( lines[j].b == lines4[it].b && absf( lines[j].b1 - lines4[it].b1 ) < 0.1f && absf( lines[j].b2 - lines4[it].b2 ) < 2.0f ) { k = 1; break; } } if ( k == 1 ) continue; k = 0; for(int i = 0; i < contour->total; i++ ) if ( PointInLine( lines[j], v_points[i] ) ) k++;
if ( k > contour->total / 8 ) { lines4[all_lines4] = lines[j]; all_lines4++; if ( all_lines4 == 4 ) break; } }//for( int j = 0; j < all_lines; j++ ) bool result = false; if ( all_lines4 == 4 ) { float x, y; for( int i = 0; i < 4; i++ ) { Intersection( lines4[i], lines4[(i+1)%4], x, y ); Points[i].x = int( x + 0.5f ); Points[i].y = int( y + 0.5f ); } result = true; } delete [] v_points; delete [] lines; return result; } Для того, чтобы не перебирать все возможные точки берутся точки через шаг step и формируются только кандидаты из соседних точек. Кандидаты – это линии. Затем линии перебираются и первые 4, которые пересекают достаточное количество точек (if ( k > contour->total / 8 )) считаются линиями сторонами четырехугольника. После этого находятся вершины четырехугольника путем нахождения пересечений линий. В этой функции следующие элементы мной умышленно не приведены, но их легко переписать самому, это:
Эту функцию Find4Points можно вызвать так в том же цикле перебора контуров: CvPoint p[4]; if ( Find4Points( c, p, Rect ) ) { for( int i = 0; i < 4; i++ ) cvLine( image, p[i], p[(i+1)%4], CV_RGB(255,0,0), 2 ); } Результат будет следующий:
Что и требовалось получить. Замечу, что этот метод требует доработки, а здесь представлена только концепция. |
|||||||
|
Так же в этом разделе:
|
|||||||

|
|||||||
|
|||||||
|